
港中大(深圳)林天麟教授在模块化自重构机器人领域取得重大突破
香港中文大学(深圳)理工学院、深圳市人工智能与机器人研究院林天麟教授团队长期从事模块化可重构机器人及多机器人系统的研究,近年来在知名国际学术期刊上发表了一系列创新成果。
2023年,林天麟教授带领团队在机器人领域顶级期刊T-RO上共发表了5篇论文。根据dblp数据库的统计数据显示,林天麟教授是T-RO创刊历史上单年发文量居首位的学者之一,在单年内以独立通讯作者身份发表了5篇论文。这是对林教授团队在该领域的技术积累和研究贡献的肯定,也展现了香港中文大学(深圳)在粤港澳大湾区乃至国内机器人领域的科研实力。

期刊介绍
IEEE Transactions on Robotics(T-RO)是电气电子工程师学会(IEEE)于1985年创办的机器人领域顶级学术期刊,该期刊发表的研究论文代表了机器人领域最先进的重大进展,内容广泛涉及理论、设计、实验研究、分析、算法、集成以及应用案例研究等多个前沿领域,要求在理论和工程实践方面共同推动机器人学的发展。
01 球形滚动接触运动建模及控制
2023年2月,IEEE T-RO在线发表题为“Kinematics Modeling and Control of Spherical Rolling Contact Joint and Manipulator”的论文。该论文首次提出并讨论了球形滚动接触运动。香港中文大学(深圳)博士后宗立军为论文第一作者,林天麟教授为论文独立通讯作者。

滚动点接触运动因其减小磨料磨损、扩大构型空间、简化控制器设计等优势而被广泛应用于球形机器人、多指机器人手、机械臂关节等运动系统。然而,目前关于圆形滚动点接触(CRC)关节的研究仅限于1-DOF。本文引入了两个滚动点接触运动球之间的虚拟切平面概念,通过四元数和轴-角表示,简明扼要地描述了SRC关节的运动,并建立了SRC关节的所有模型要素,包括旋转矩阵、位置向量和自由模态等。利用SRC关节模型和阻尼最小二乘法等方法,系统规范地建立了SRC关节机械臂的正逆运动学方程。
本文以改进的模块化自重构机器人FreeBOT为例,实现了SRC关节和机械臂的运动。基于物理仿真引擎构建了SRC关节机械臂的仿真环境,真实模拟了SRC关节机械臂的物理运动。同时,利用FreeBOT搭建了SRC关节机械臂的实物系统。在仿真系统和实物上验证了SRC关节和机械臂的运动模型以及FreeBOT的运动规划与控制方法,机械臂末端执行器的运动精度在同时控制位置时达到位置误差小于4mm,姿态误差小于1.5°;同时验证了在狭窄空间内,SRC 关节机械臂能够实时地躲避障碍物,并且机械臂末端执行器高精度地到达期望位姿。

论文链接:https://ieeexplore.ieee.org/document/9858332
02 球形模块化可重构机器人的连接规划
2023年4月,IEEE T-RO在线发表题为“Auto-Optimizing Connection Planning Method for Chain-Type Modular Self-Reconfiguration Robots”的论文。该论文提出了链式模块化机器人的一种连接规划方法。香港中文大学(深圳)博士生罗浩波为论文第一作者,林天麟教授为论文独立通讯作者。

模块化自重构机器人能够根据环境和任务在不同的构型之间转换,连接规划算法指定了重构过程中每一步应该断开或新建的连接。连接规划结果的效率决定了整个自重构过程的速度。以往的研究已经证明最优连接规划问题的NP完全性,意味着多项式时间内难以找到最优解。当前研究的两个主要方向是计算近优解的多项式时间算法和计算最优解的指数时间算法。
本文首先将硬件模块抽象为多入度单出度(MISO)模块,其中模块的被动连接点总数和主动连接点总数可以分别被转化为图论中节点的入度和出度。构型的连接关系可以表达为邻接矩阵,进而绘制为简单有向图。本文提出了入度匹配(IM)算法,其中提出了子树相异度的概念,利用连接点的可交换性减少冗余步骤,以获得初始构型和最终构型的公共子图。
本文介绍了树型分支与定界(TBB)算法,其中提出了新的分支策略和阶段成本,并从理论上证明了 TBB 在指数时间内保证到达全局最优解的计算复杂度。通过判断子匹配节点的累加阶段成本并剪枝从而减小搜索空间。TBB算法的上界由多项式时间算法的解的代价初始化,在每次得到一个近优解时逐步下调,最终逼近全局最优解。

论文链接:https://ieeexplore.ieee.org/document/9962372
03 异构多智能体强化学习在多机器人系统中的应用
2023年8月,IEEE T-RO在线发表题为“Asymmetric Self-Play-Enabled Intelligent Heterogeneous Multirobot Catching System Using Deep Multiagent Reinforcement Learning”的论文。该论文提出了一种创新的多智能体强化学习框架,并实现其在机器人围捕任务中的应用。深圳市人工智能与机器人研究院高源博士为论文第一作者,林天麟教授为论文独立通讯作者。

多机器人系统是一个涉及协调和控制多个机器人的复杂性问题领域。目前,已经有很多关于同构机器人的研究,但越来越多的关注点集中在具有不同功能和特点、共同工作的异构设置上。
本文提出了一种基于演员-评委(Actor-Critic)多智能体强化学习框架,旨在解决异构机器人团队在合作博弈中的挑战。该框架通过融合不对称自我博弈和课程学习技术,实现了异构机器人团队之间的合作行为。这一创新框架使得异构多机器人系统能够在真实世界的约束条件下执行复杂的捕捉任务。研究团队进行了模拟实验,以评估不同机制对方法性能的影响,并通过现实世界试验评估了系统在复杂真实围捕问题中的表现。此外,研究团队进行了与S2M2方法的桥接研究,结果表明本文所提方法在对抗性环境下表现更优越。通过在训练期间融合不对称自我博弈和课程学习的框架,研究团队成功地在模拟和真实世界约束条件下完成了异构多机器人团队的捕捉任务,为未来大规模智能安全与救援异构多机器人团队提供了有力的方向。

论文链接:https://ieeexplore.ieee.org/document/10101687
04 模块化自由重构机器人及构型识别
2023年12月,IEEE T-RO在线发表题为“Configuration Identification for a Freeform Modular Self-reconfigurable Robot – FreeSN”的论文。该论文提出了一个自由连接及桁架结构的模块化自重构机器人系统,并实现了其构型感知功能。香港中文大学(深圳)博士生涂宇啸为论文第一作者,林天麟教授为论文独立通讯作者。

与传统机器人系统相比,模块化自重构机器人系统具有更强的鲁棒性和适应性。在本研究中,研究团队提出了一种名为FreeSN的新型自由连接及桁架结构的模块化自重构机器人系统,其由节点模块和连杆模块组成。节点模块的表面覆盖着铁球壳,并集成了磁传感器阵列。而连杆模块则包含两个磁性自由连接器,可连接到节点模块的任意位置并实现运动。
在本文中,研究团队引入了一种适用于FreeSN的创新构型感知系统,其中包括连接点磁定位、模块识别、模块相对位姿融合和系统构型估计等方面。节点模块内置的磁传感器阵列可感知周围磁场的变化,通过基于图卷积神经网络的磁定位方法,节点模块能够定位连杆模块的中心点并进行实时追踪。同时,连杆模块通过微调磁铁阵列的位置改变周围区域的磁场,从而与节点模块进行磁通讯,实现邻接模块的准确识别。接着,通过将磁定位结果与惯性测量单元和轮式里程计数据进行融合,能够估计邻接模块的相对姿态。最终,该构型感知系统可以全面估计机器人系统的全局构型,包括连接拓扑图和所有模块的相对位姿。基于该构型感知系统,FreeSN得以实现闭环控制,从而实现系统的特定行为。研究团队通过一系列精度评估实验和两个基于库的闭环自动化控制演示对该构型感知系统进行了验证。

论文链接:https://ieeexplore.ieee.org/document/10232916
05 球形齿轮结构及其灵巧关节应用
2023年12月,IEEE T-RO在线发表题为“DISG: Driving-Integrated Spherical Gear Enables Singularity-Free Full-Range Joint Motion”的论文。该论文提出了一个新颖的驱动集成球形齿轮结构并讨论了其作为灵巧关节的特性。香港中文大学(深圳)博士生梁冠琪为论文第一作者,林天麟教授为论文独立通讯作者。

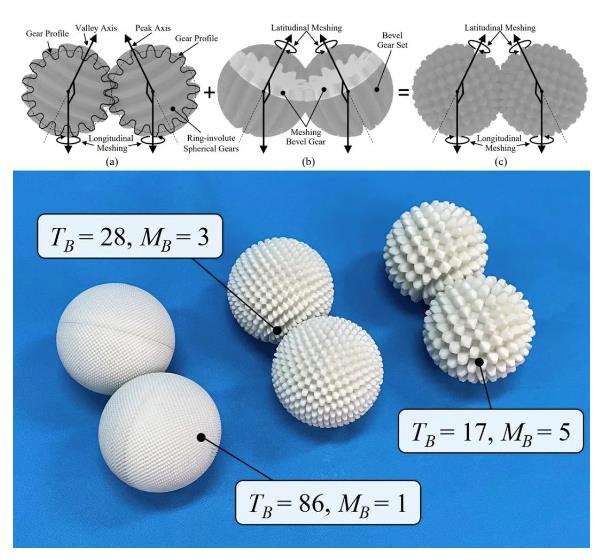
近年来,机器人领域对灵巧关节的兴趣日益增加,特别是球形齿轮引起了广泛关注。球形齿轮作为传统平面齿轮的三维扩展,具备多个旋转自由度,能够改变空间方向,因此在实现多自由度单关节方面展现出巨大的潜力和优势。然而,目前对球形齿轮的研究主要集中在被动齿轮的设计上,而现有基于球形齿轮的传动机构在灵巧性和运动范围方面仍有待提升。
本文介绍了一种创新的驱动集成球形齿轮(DISG),提出了一种全球面啮合和可驱动的球形齿轮结构,由在经度和纬度方向上均能啮合的球形齿轮组合而成。此外,通过主动驱动磁体和被动跟随磁体跨越上述球形齿轮,保持磁性连接,实现了两个球形齿轮之间的全球面可驱动功能,从而实现了一个灵巧的多自由度滚动接触关节。通过运动学分析和一系列原型机实验验证,结果显示DISG具备无奇异和全范围工作空间的运动学特性。与其他关节执行器相比,DISG在灵巧性、运动范围、紧凑性和轻量化方面都表现出显著的优势。
论文链接:https://ieeexplore.ieee.org/document/10266738
教授介绍

林天麟,是机器人与智能制造国家地方联合工程实验室常务副主任,深圳市人工智能与机器人研究院中心主任,广东省杰出青年基金获得者,IEEE高级会员。
他师从港中大(深圳)校长徐扬生院士,分别于2006年和2010年在香港中文大学获得一等荣誉学士学位和博士学位。林教授长期从事模块化机器人、多机器人系统及特种机器人的研究工作,至今在T-RO、TPAMI、TMECH、TIP、TNNLS等机器人与人工智能领域知名期刊及会议发表论文100余篇,其中2023年以独立通讯作者身份在T-RO发表论文5篇;获TMECH年度最佳论文奖、IROS机器人机构设计最佳论文奖。作为项目负责人,林教授主持国家自然科学基金委、国家科技部、广东省科技厅、深圳市科创委的多项科研课题。其相关研究成果多次被路透社、探索频道、IEEE Spectrum等众多国际知名媒体报导。
团队简介

Freeform Robotics团队由林天麟教授领导,于2019年成立,旨在研究多机器人系统自由组成各种形态以解决不可预知问题的关键技术,通过简单智能体的集群实现复杂的智能群体行为,让机器人系统拥有可复用、自由构型、可拓展、故障自修复等通用特性,为机器人设计领域创造出一种全新切实可行的实现形态。团队长期从事机器人和人工智能研究,承担来自国家自然科学基金委、国家科技部、广东省科技厅、深圳市科创委等多项重要研究项目;科研成果发表于T-RO、TPAMI、TMECH、TIP等机器人与人工智能领域的国际期刊和会议上。关于模块化自重构机器人FreeBOT的研究成果获2020年IROS机器人机构与设计最佳论文奖,IEEE Spectrum、日本放送协会NHK和Engadget 等多家国际知名媒体对其进行了广泛报道。
图文内容由林天麟教授团队提供


